学习离线渲染最好从这99行代码开始:
smallpt: Global Illumination in 99 lines of C++
但这份代码有些小问题:
- 所有对象都是sphere。如果场景基于mesh的话,代码要改不少。
- 为了压缩行数,一些代码的理解不太直观。
进阶一点的话看:
为什么叫路径追踪Path tracing
最暴力的光线追踪算法,是对第一个intersection point,都发射出大量的随机方向光线(每一条光线又会产生大量递归光线),所有光线返回的radiance加权平均就是该点的radiance。
这样需要发射的光线太多,计算量太大。
而路径追踪,从屏幕像素出发的光线不会分裂,当然代价就是噪声会很大,有多种降噪方法,一种是从屏幕像素发射不止1条光线而是N条(每条依然不分裂),然后算平均值;一种是用类似TAA的temporal filter方法, 每一帧做次像素jitter,并混合历史帧实现超采样。
双向路径追踪
这是一种更高效的路径追踪算法。包括了两方面:
- Backwards Path Tracing。从屏幕射出光线,到达光源时终止。
- Light Tracing (or Forwards Path Tracing)。从光源射出光线,到达屏幕时终止。
算法关键点
假设开发一个基于path tracing积分器、输入为mesh模型、包含几种基本材质的离线渲染器,下面是需要掌握的点。
每个像素的光线发射流程
- 根据该像素的屏幕坐标、摄像机空间位置,算出Ray的o和d
- 初始化Li为Color::Black。Li是指这根光线最终返回时收集到的Radiance,因为假设场景中没有光源(自发光物体认为是区域光源),那么场景必然是黑的。
- 初始化pathThroughput为Color::White。pathThroughput大概就是指反射率,但是是要累乘的,每次光线反弹,要不断乘以材质的反射率。
- 开始进入无限递归Loop(物理上也可认为光线能无限弹射)
- Scene.Intersect(ray),光线和场景做相交判定。
- 如果不相交,那么 Li += pathThroughput * 环境贴图的Radiance(非必要功能,且这里面很复杂),并退出循环,否则继续后续步骤
- Li += pathThroughput * 相交点的自发光Radiance(区域光)
- 根据相交点的BSDF是不是specular
空间加速结构
现在显卡从硬件上支持了空间加速结构,软渲的话直接找个BVH的开源实现比较省事,也方便后面直接移植GPU。不过要注意传给BVH的ray的起点坐标,要沿着ray的朝向偏移一点点,不然可能会自相交。
几何数学
Barycentric Coordinates 和 Cramer's rule
bvh intersect的结果如果只返回了距离t,那么只能知道碰撞点P在ray.o + t * ray.d,并不能知道P点的法线。
法线有两种情况:
- mesh没有顶点法线。这种可以根据3个顶点坐标,叉积算出面法线,P点的法线和面法线一样。
- mesh有顶点法线。此时需要根据P点的Barycentric Coordinates,插值得到P点法线。
Barycentric Coordinates,除了用面积法算之外,还可以用Cramer's rule(克莱姆法则)算(更快):
void Barycentric(const Vector3& hitPoint, float& u, float& v, float& w) const
{
/*
P_hit = p_1 + u * (p_2 - p_1) + v * (p_3 - p_1)
u * (p_2 - p_1) + v * (p_3 - p_1) = P_hit - p_1
B = p_2 - p_1
C = p_3 - p_1
A = P_hit - p_1
=>
u * B + v * C = A (it is vector!)
convert to linear system =>
(u * B + v * C)·B = A·B (it is scalar!)
(u * B + v * C)·C = A·C
u * B·B + v * C·B = A·B
u * B·C + v * C·C = A·C
【 B·B C·B 】 【 u 】 A·B
【 B·C C·C 】 【 v 】 = A·C
【 d00 d01 】 【 u 】 d20
【 d01 d11 】 【 v 】 = d21
det = | d00 d01 |
| d01 d11 |
det_u = | d20 d01 |
| d21 d11 |
det_v = | d00 d20 |
| d01 d21 |
*/
Vector3 B = point_[1] - point_[0], C = point_[2] - point_[0], A = hitPoint - point_[0];
float d00 = B.dot(B);
float d01 = C.dot(B);
float d11 = C.dot(C);
float d20 = A.dot(B);
float d21 = A.dot(C);
float denom = d00 * d11 - d01 * d01;
float denom_u = d20 * d11 - d01 * d21;
float denom_v = d00 * d21 - d20 * d01;
float inv_denom = 1 / denom;
float u1 = denom_u * inv_denom;
float v1 = denom_v * inv_denom;
// P_hit = p_1 + u * (p_2 - p_1) + v * (p_3 - p_1)
// =>
// P_hit = (1 - u - v) * p_1 + u * p_2 + v * p_3
u = 1 - u1 - v1;
v = u1;
w = v1;
}
(参考:https://ceng2.ktu.edu.tr/~cakir/files/grafikler/Texture_Mapping.pdf )
这个一般的
用俄罗斯轮盘赌算法(Russian Roulette)终止递归
先复习一个概念:数学期望E。
数学期望是指,每次可能的结果乘以其结果概率的总和。
例如丢骰子游戏,每个面出现的概率是1/6,那么丢出来的结果数学期望是多少呢?
\[ E(X) = 1 \cdot \frac{1}{6} + 2 \cdot \frac{1}{6} + 3 \cdot \frac{1}{6} + 4 \cdot \frac{1}{6} + 5 \cdot \frac{1}{6} + 6 \cdot \frac{1}{6} = 3.5 \]
在路径追踪中计算Radiance时,需要算每个intersection point的Radiance,实际上算的也只是Radiance的数学期望,假设Radiance的取值只有两种:Lo或者0,Lo是指继续沿着光线路径,追踪得到的Radiance值;而0则是终止追踪返回的值(纯黑色)。设继续追踪的概率为P,终止追踪的概率为1-P。
于是Radiance的数学期望为:
\[ E = Lo \cdot P + 0 \cdot (1 - P) = Lo \cdot P \]
可以看到,E和Lo不等,且比值为P。这个P可以巧妙地干掉,只需要改下公式:
\[ E = \frac{Lo}{P} \cdot P + 0 \cdot (1 - P) = Lo \]
因为P是递归的概率,只要P小于1,那么就不可能无限递归。
光源
光源数据结构问题
光源是point light(无体积)。
光源是一个三角面片模型,那么采样光源时,需要随机采样光源投影后的面积上的点,比较复杂。
光源是area light,即一个quad面片,做采样也不会太复杂。
光源是方向光,Emmm。
光源远或面积过小时,采样不足
均匀随机的光线,很难命中过小的光源,就会产生很强烈的噪点。解决该问题的办法叫emitter sampling,即从intersection point直接发射一条到光源的光线。因为光源有面积,所以目标点不是光源原点,而是需要在光源面积范围上随机出一个目标点,从而得到随机化的光线方向。
光源被遮挡问题
上面说的emitter sampling,是假设了intersection point和光源之间无遮挡。如果存在遮挡,那么不应该直接采样获得光源的Radiance。为了避免这个问题,需要搜索下BVH,判断是否有遮挡,有的话终止。
重要性采样
在一些简单的光线追踪代码中,一般只实现了diffuse材质,并且声明实现了Cosine importance sampling。其实对于diffuse材质来说,重要性采样就是cos,方向越接近法线,cos就越大,采样率应该越底。所以他们这个feature很简单就加上了。。
材质问题
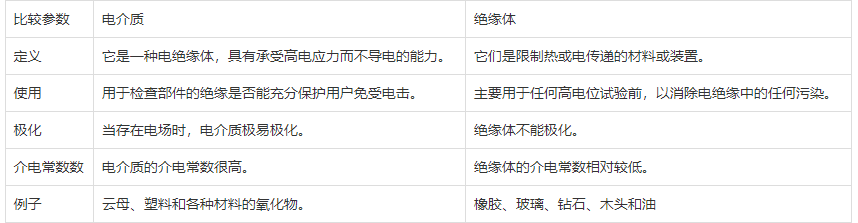
dielectrics
即电介质, 或称 non-metallic surfaces
电介质大部分是固体,包括:瓷器,玻璃,塑料,氧化后的金属;液体包括:水、油;气体包括:空气、氮。
纯水是电介质,不纯的水可以导电(变成了导体)。
电介质(dielectrics)不完全等于绝缘体(insulators)。
电介质和绝缘体之间的区别在于,在电场中存储或保存电能的材料是电介质材料,而在另一方面,阻止电场中电子流动的材料是绝缘体。
conductors
即导体,或称 metallic surfaces
材质细分
- 粗糙材质(LambertianDiffuse)
- 镜面材质(Mirror)
- 电介材质(Dielectric/Glass)
高级材质:
- 粗糙导体(RoughConductor)
- 粗糙电介质(RoughDielectric)
- 迪士尼材质(Disney)
- 次表面材质
材质的不同,不止是参数不同,往往代码都是差了十万八千里。
BSDF、BRDF、BTDF
BSDF 是 BRDF和BTDF的统称。
BSDF这个东西其实就是个系数。
电介材质问题
折射率 Refractive index (IOR)
折射率描述了光在电介质中的速度和真空里的速度的比值。
例如水是1.333,表示光在真空的速度比在水里的速度快1.33倍;玻璃则是1.5。
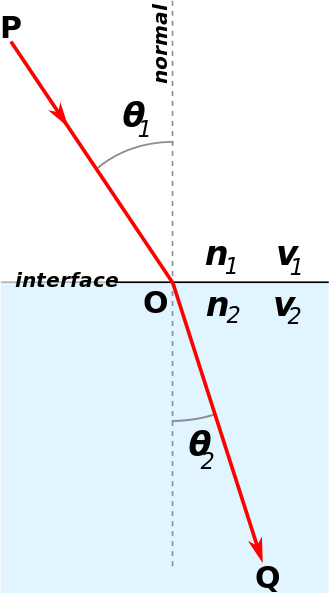
斯涅尔定律Snell's Law 和全内反射Total Internal Reflection
斯涅尔定律是用来算光经过不同介质时的折射方向的,前提是知道2个介质的折射率。
\[ η⋅sinθ=η′⋅sinθ′ \]
η、η′、sinθ是已知信息,sinθ′是要求的值。变换下上式:
\[ sinθ′=\frac {η}{η′}⋅sinθ \]
全内反射:当光线经过两个不同折射率的介质时,部分的光线会于介质的界面被折射,其余的则被反射。但是,当入射角比临界角大时(光线远离法线),光线会停止进入另一界面,全部向内面反射。
根据上面的公式可以理解这个问题,当η大于η'时,\( \frac {η}{η′}⋅sinθ \) 可能会大于1,而sin取值范围是[-1,1],这就导致了sinθ′无解。
于是就有了一个叫临界角的概念,当θ大于临界角时,光只能反射而不能折射。临界角的计算推导:
假设\( θ_{c} \)是临界角,那么有:
\[ \frac {η}{η′}⋅sinθ_{c} = 1 \]
转换一下位置:
\[ sinθ_{c} = \frac {η′}{η} \]
\[ θ_{c} = arcsin(\frac {η′}{η}) \]
当实现电介材质(水、玻璃)时,需要考虑全内反射问题。
菲涅耳反射率 Fresnel Reflectance
上面只解决了光通过电介质时的折射方向,但是究竟多少能量被折射(以及剩下多少能量反射),是不知道的。
假定反射率为x,那么根据能量守恒可以知道折射率为1-x。
反射率一般用近似公式算(Schlick's approximation)。
用俄罗斯轮盘赌算法(Russian Roulette)算期望
这里用这个轮盘赌可以理解成减少光线分裂数。这是因为光经过不同介质时,只要不是全内反射,那么必然会分裂成2个光线,假设整个场景都是各种电介质,那么path tracing跑一遍就很慢了。
于是要引入轮盘赌:要么折射要么反射,没有光线分裂。并且利用了除以P的技巧,使得能量守恒。
写作不易,您的支持是我写作的动力!

